中国高速路快速路拥堵场景的航测数据集
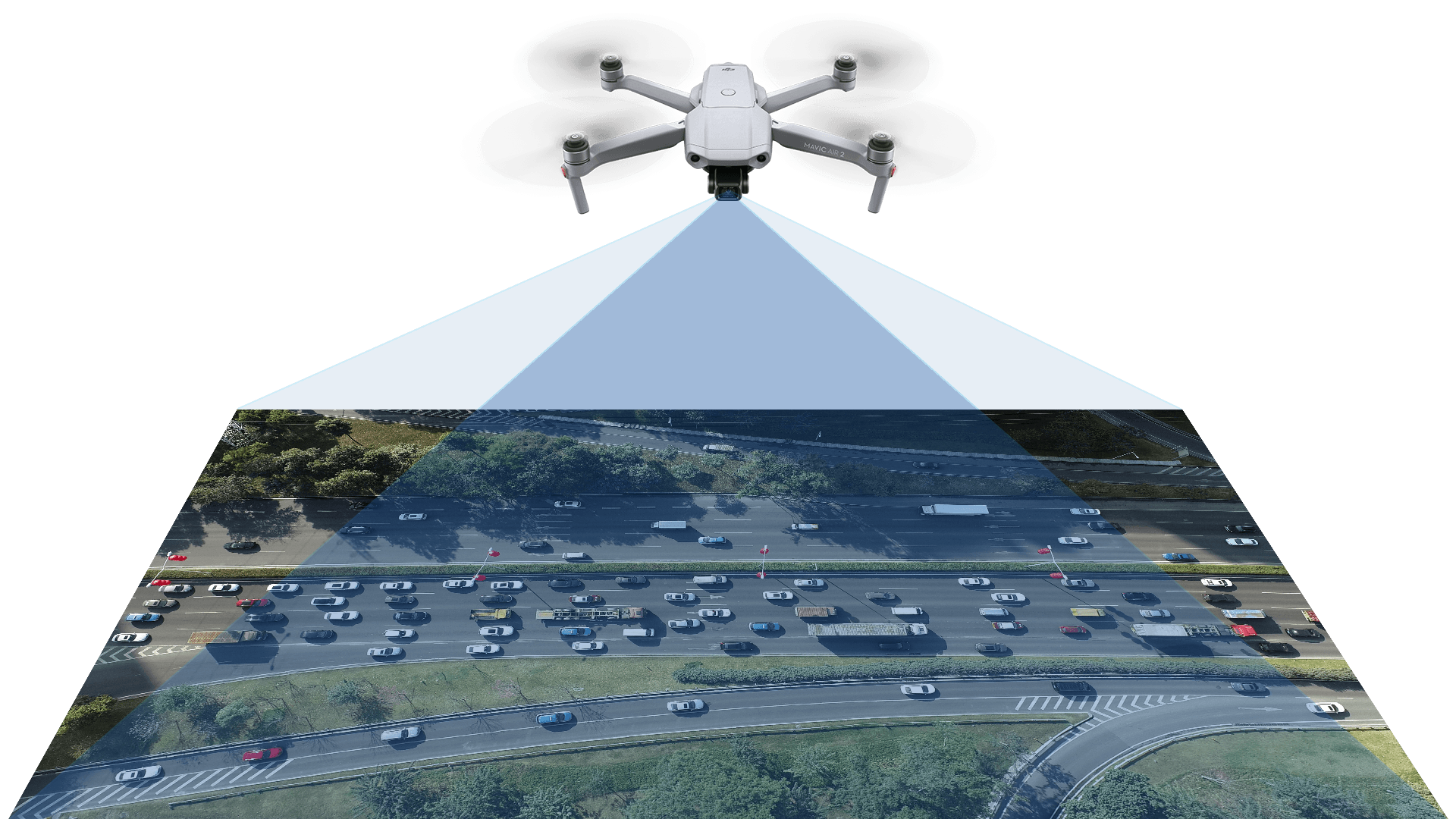
AD4CHE,针对中国典型驾驶拥堵场景,采用无人机悬停航测,基于多种中国城市场景的部分高速路和快速路进行数据采集。采集轨迹共计 53761 条,采集轨迹长度共计 6540.7 公里,采集精度为 5 cm 左右,最大误差不超过 10 cm。
AD4CHE 格式说明数据模型
轨迹数量 :53761
图像数据帧数 :552960
轨迹长度:6540.7km
数据集特点
包括多种中国城市场景
主要针对 0-80km/h 的拥堵驾驶场景
复杂的结构道路类型(包含弯道、车道汇入/汇出)
丰富的车辆坐标系参数(如航向角、横摆角速度、横向偏移量等)
数据内容
碰撞时间 TTC、车头时距 THW、车头距离 DHW
周围八个位置的车辆信息
车辆相对位置信息、速度信息、航向角、横摆角速度、车道等
作用及用途
自然交通参与者行为分析
为传感器、感知与决策算法提供真值
快速生成自动驾驶测试场景
衍生设计用于场地测试的目标障碍物
无人机航测采集与处理流程
1. 统一航测数据采集标准,提高数据采集的准确性和一致性
• 拍摄路段周边观察
• 飞行前无人机状态设置(电量及存储器检查、摄像机参数设置、起飞地点、飞行路线规划、悬停位置设定等)
2. 对原始视频数据进行视频对齐预处理,提高后续目标识别的准确性
• 利用开头帧-中间帧-结束帧的特征识别,将所有图像帧对齐至开头帧
• 通过在可控环境、理想地面条件下进行尺寸标定,对采集精度进行像素尺寸误差分析(总体精度为 5 cm 左右,最大误差不超过 10 cm )
3. 获取训练样本数据、训练车道线检测及车辆检测的 CNN 模型
• 通过半自动化标注获取训练样本数据( 10000 张车道线标注及 50000 张车辆标注)
• 车道线及车辆检测(区分轿车、卡车和客车)的 CNN 模型训练,并对车辆检测结果进行追踪
4. 对模型检测和车辆追踪结果进行后处理(如平滑等),优化状态估计,格式化输出数据
